Jedes Autonavi, Smartphone und smarte Hundehalsband hat es - GPS. Im allgemeinen Sprachgebrauch steht GPS mittlerweile synonym für jede Form der satellitengestützten Positionsbestimmung; im technischen Sinne beschreibt GPS aber einzig das amerikanische Navigationssatellitensystem. Der Vollständigkeit seien auch die anderen - für uns relevanten - Navigationssatellitensysteme genannt: Galileo (Europa), GLONASS (Russland) und BeiDou (China). Diese Länder- bzw. Gemeinschaftssysteme werden unter dem Begriff „Globales Navigationssatellitensystem“ (GNSS) zusammengefasst.
Die Positionsbestimmung mit Hilfe von Satelliten kann eine Messungenauigkeit von mehreren Metern haben. Die Gründe für die Ungenauigkeit sind vielfältig: Hohe Hindernisse (Gebäude oder Bäume) in unmittelbarer Nähe, Reflektionen oder atmosphärische Störungen, die das Satellitensignal beeinträchtigen. Daneben sind die technischen Eigenschaften des Empfängers zu beachten. Das Autonavi benötigt z.B. keine Messgenauigkeit von wenigen Zentimetern, denn die Routensoftware geht stets davon aus, dass sich das Fahrzeug auf einer Straße befindet. Es reicht eine grobe Positionsbestimmung und die Software „fängt“ die nächstgelegene Straße. Ich kann dieses Phänomen bei großen Autobahnkreuzen beobachten. Das „kleine Auto“ im Display springt wie von Zauberhand von der einen auf die andere Fahrspur. Bei Consumerdrohnen ist dies ähnlich und mag für den Hobbypiloten im Ergebnis ausreichend sein. Für Vermessungsdrohnen sind „mehrere Meter“ Messungenauigkeit allerdings inakzeptabel.
In einem ersten Schritt kann die Messungenauigkeit auf wenige Dezimeter verringert werden, wenn der verbaute/angeschlossene Empfänger mehrere Navigationssatellitensysteme nutzen und verschiedene Frequenzen verarbeiten kann. Satelliten übermitteln Daten über verschiedene Frequenzen simultan (zivil: L1, L2, L5). Je höher die Anzahl der empfangbaren Satelliten und je mehr Frequenzen gelesen werden können, desto geringer wird die Messungenauigkeit. Das Mehr führt aber unweigerlich zu zwei negativen Aspekten des Fluggeräts: Die Drohne wird schwerer und teurer.
Für die Mavic 3 Enterprise und Thermal kann ein RTK-Modul zusätzlich gekauft werden. Das Modul empfängt fünf Navigationssatellitensysteme und kann je zwei Frequenzen pro System verarbeiten. Das Modul wird einfach auf der Drohne aufgeschraubt. Der Anschaffungspreis liegt bei ca. 640 Euro (Stand: 04/2024). Das RTK-Modul erhöht das Abfluggewicht um ca. 25 Gramm. Bei der Mavic 3 Multispectral ist das Modul bereits im Lieferung enthalten.
Die Messungenauigkeit kann aber noch weiter verringert werden. Eine Ungenauigkeit von nur 1 bis 2 Zentimeter vertikal und 2 bis 3 Zentimeter horizontal ist möglich. Voraussetzung ist, zu den Satellitendaten empfängt die Drohne ein zusätzliches Korrektursignal einer Bodenstation. Das Verfahren nennt sich dann Real Time Kinematik (RTK). Auf dem Rathausdach in Gummersbach befindet sich beispielsweise eine Bodenstation, die zentimetergenau eingemessen wurde. Rund um die Uhr bestimmt die Bodenstation ihre Position anhand von Satellitensignalen. Durch Vergleich der fest eingetragenen mit den berechneten Koordinaten wird ein Korrekturwert ermittelt. Der Korrekturwert wird über das Internet verteilt. Die Drohne korrigiert sowohl ihre Flugposition im Raum als auch die Koordinaten des Bildmittelpunktes eines Fotos.
Gültigkeit hat ein Korrekturwert in einem Umkreis von ca. 20 Kilometern um die jeweilige Bodenstation. Eine weitere Entfernung führt wieder zu Messungenauigkeiten. In Nordrhein-Westfalen ist sowohl die Registrierung als auch die Nutzung des Korrekturwertes kostenlos. Andere Bundesländer erheben schon mal eine Registrierungsgebühr oder die Datennutzung ist kostenpflichtig. Wer es für sein Bundesland nachschauen möchte, gibt „SAPOS“ und den Namen seines Bundeslandes in eine Suchmaschine ein.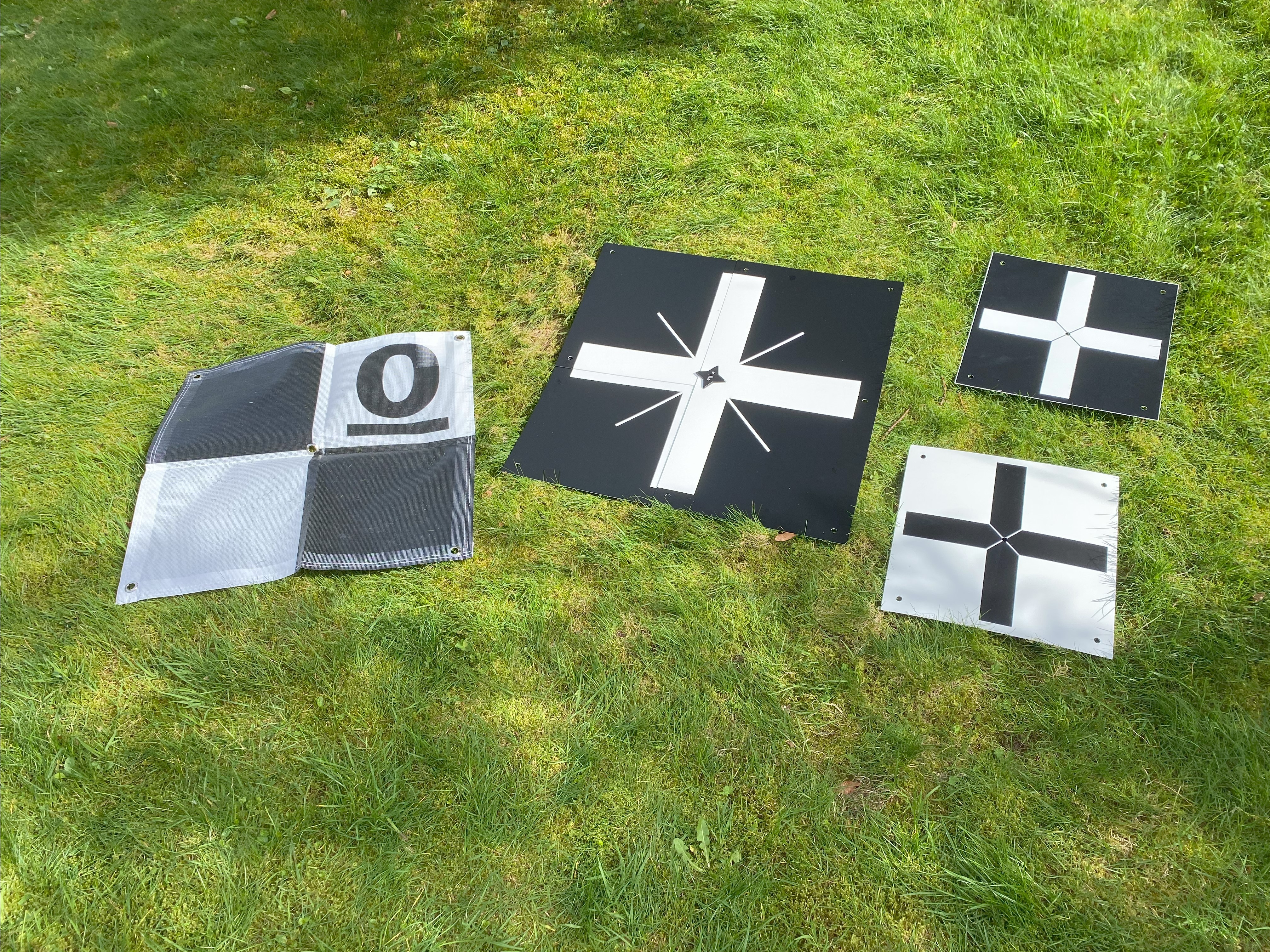 Referenzpunkte sind markierte und eingemessene Punkte im Befliegungsgebiet. Zur Markierung nutze ich unterschiedlichste Bodenmarken. Die kleinen Marken sind 35 x 35 cm groß, weiß mit schwarzem Kreuz, auf der Rückseite schwarz mit weißem Kreuz. Ich nutze die kleinen Marken bei Flügen bis 80 Meter Höhe. Darüber hinaus wird es für mich schwierig, das Kreuz auf dem Foto zu erkennen und den Mittelpunkt zu markieren. Die großen Marken sind ebenso beidseitig bedruckt (helle und dunkle Seite); aufgefächert sind sie 65 x 65 cm groß. Die Sichtbarkeit auf den Fotos ist sehr gut. Die Bodenmarken sind robust, verfügen am Rand über vorgebohrte Löcher für Erdheringe und ein Loch mittig für die Messstabspitze.
Referenzpunkte sind markierte und eingemessene Punkte im Befliegungsgebiet. Zur Markierung nutze ich unterschiedlichste Bodenmarken. Die kleinen Marken sind 35 x 35 cm groß, weiß mit schwarzem Kreuz, auf der Rückseite schwarz mit weißem Kreuz. Ich nutze die kleinen Marken bei Flügen bis 80 Meter Höhe. Darüber hinaus wird es für mich schwierig, das Kreuz auf dem Foto zu erkennen und den Mittelpunkt zu markieren. Die großen Marken sind ebenso beidseitig bedruckt (helle und dunkle Seite); aufgefächert sind sie 65 x 65 cm groß. Die Sichtbarkeit auf den Fotos ist sehr gut. Die Bodenmarken sind robust, verfügen am Rand über vorgebohrte Löcher für Erdheringe und ein Loch mittig für die Messstabspitze.
Die Bodenmarken aus Stoff habe ich neu und bislang keinen Test durchgeführt. Sie sind 61 x 61 cm groß und, da aus Stoff, leichter und handlicher als die anderen Marken. Durch die aufgedruckten Zahlen (0 bis 9) erhoffe ich mir eine schnellere Zuordnung der Punkte am Rechner. Die Bodenmarke kann mit Erdheringen im Boden verankert werden. In der Mitte ist ein Loch, verstärkt mit einem Metallring, für die Messstabspitze. Ich bin gespannt, ob die Sichtbarkeit ebenso gut wie bei den großen Bodenmarken sein wird. Vor der Befliegung gehe ich das Gebiet ab und setze jeweils am tiefsten und höchsten Geländepunkt eine Bodenmarke. Die Punkte sollen später das Höhenmodell stützen. Anschließend verteile ich weitere Marken gleichmäßig über das Gebiet. Im unmittelbaren Randbereich machen Marken meiner Meinung nach nicht viel Sinn, da die Anzahl der Fotos mit Bodenmarke gering sein wird. Die Drohne wird die Marke auch höchstwahrscheinlich nicht überfliegen, so dass einzig Schrägaufnahmen existieren. Ich empfinde es als äußerst schwierig, in Schrägaufnahmen die Mitte einer Bodenmarke fehlerfrei zu markieren. Ist die Bodenmarke ausgelegt und mit Erdheringen verankert, wird der Messstab ausgerichtet. Für die Bestimmung der Koordinaten nutze ich den GNSS-Receiver Reach RS2 der Firma Emlid. Verbunden ist der „Pilzkopf“ mit meinem Smartphone. Gesteuert wird der Receiver über eine App. Die Bedienung ist recht komfortabel und das Erscheinungsbild übersichtlich gehalten. Der GNSS-Receiver empfängt die Navigationssatellitensysteme GPS, Galileo, GLONASS und BeiDou. Lesbare Frequenzen sind L1, L2 und L5. Ist das Smartphone zudem online, können Korrekturwerte empfangen und eine Messgenauigkeit von 1 bis 2 Zentimeter vertikal und 2 bis 3 Zentimeter horizontal erreicht werden (RTK).
Vor der Befliegung gehe ich das Gebiet ab und setze jeweils am tiefsten und höchsten Geländepunkt eine Bodenmarke. Die Punkte sollen später das Höhenmodell stützen. Anschließend verteile ich weitere Marken gleichmäßig über das Gebiet. Im unmittelbaren Randbereich machen Marken meiner Meinung nach nicht viel Sinn, da die Anzahl der Fotos mit Bodenmarke gering sein wird. Die Drohne wird die Marke auch höchstwahrscheinlich nicht überfliegen, so dass einzig Schrägaufnahmen existieren. Ich empfinde es als äußerst schwierig, in Schrägaufnahmen die Mitte einer Bodenmarke fehlerfrei zu markieren. Ist die Bodenmarke ausgelegt und mit Erdheringen verankert, wird der Messstab ausgerichtet. Für die Bestimmung der Koordinaten nutze ich den GNSS-Receiver Reach RS2 der Firma Emlid. Verbunden ist der „Pilzkopf“ mit meinem Smartphone. Gesteuert wird der Receiver über eine App. Die Bedienung ist recht komfortabel und das Erscheinungsbild übersichtlich gehalten. Der GNSS-Receiver empfängt die Navigationssatellitensysteme GPS, Galileo, GLONASS und BeiDou. Lesbare Frequenzen sind L1, L2 und L5. Ist das Smartphone zudem online, können Korrekturwerte empfangen und eine Messgenauigkeit von 1 bis 2 Zentimeter vertikal und 2 bis 3 Zentimeter horizontal erreicht werden (RTK).